アイガモ装甲部隊
岐阜県は各務原市の「岐阜県情報技術研究所」。そこでここ10年ほど、官民一体となってアイガモロボットの開発が進められているという。このような場所での取材はめったにないことなので、おおいに緊張しながら建物の中に入る。

「テクノプラザ」=先進情報産業団地の中に研究所はある。

メカトロ研究部長の遠藤氏(左)・専門研究員の光井氏(右)に、丁寧な説明をいただく。
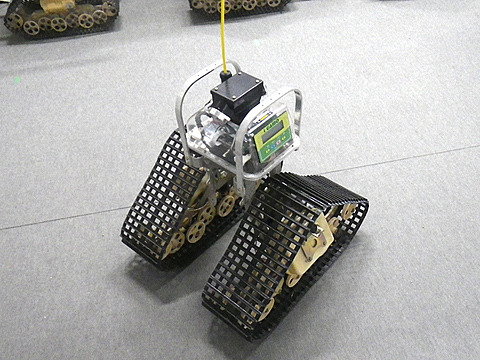
研究室の床では、アイガモロボットの初号機から現行機までが、思い思いの場所にたたずんでいた。写真で見た印象よりも一回り大きく、少々圧倒される。

アイガモロボット勢揃い。うん、「アイガモ」なんだよなぁ。
失礼ながら、どの角度からもアイガモには見えない。2つのキャタピラーがアイガモの足のように回転し…違うな。そもそも、害虫や雑草をぱくぱくと食べてくれるのだろうか?
このアイガモロボットは虫を食べたりしない。2つのキャタピラー(クローラーという)で移動する間に田んぼの底を掻いて雑草を踏み潰したり、舞い上がった泥で日光を阻害し、雑草の繁茂を邪魔してくれるのだという。一見、地味な役割のようではあるが、実はこの「掻き回して泥を巻き上げると除草(抑草)につながる」というところが、もともとアイガモ農法の重要な部分のひとつだそうなのである。
ところで、勢い込んで岐阜まで来たが、よくよく考えたら今はもうとっくに田植えの終わったシーズンだ。実際の田んぼでアイガモロボットが活躍するシーンは見られない。ガーン!
なのでここでは参考までに、今年の田植えシーズン時にお披露目したときの写真をお借りしたので、とりあえず雰囲気だけでもご覧ください。

彼らの前に突如現れるガンタンク。

各種センサーを駆使し、苗をまたいで進んでいく。「またぐ」のにも理由がある。

アイガモにしたら、ターミネーターのように見えるかもしれない。
そもそも、なぜアイガモ「ロボット」を作ることになったのか。
アイガモ農法は、見ている分にはかわいいし環境にもやさしそうだしいいことずくめのようだが、実は非常に手間がかかるものだという。害虫や雑草だけではえさが足りないのでえさ代はかかるし、田んぼの巡回にムラができたり、動物に襲われたり…
また、雑草が大きくなってしまうと食べてくれないそうだ。逆に、稲が小さいうちは稲も食べてしまったり、泳ぎまわることで苗がやられたりもする。さすがに動物、なかなか思い通りにはいきません。
そして、有機栽培で一番頭が痛いのは、まさに「除草作業」なのだ。
よって、従来の手間や不確定要素などを省き、低コストで環境への負担も軽いこのようなロボットを開発し、農業従事者の負担を減らし作物の価値を上げていくことが、この研究の命題となっているのである。
次のページでは、それぞれの試作機にこめられた工夫など、見ていくことにしよう。
もはやアイガモではない
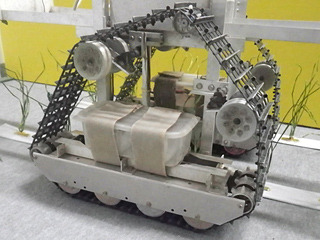
現行モデルがこれである。ここにいたるまでの長い試行錯誤の様子は、研究所のサイトで資料が公開され読めるようになっている。一通り目を通してみたが、それはそれは大変なものだった。
まず「足はクローラでいいのか?」という問題。ボート型やタイヤのついたタイプなど試すも、整っていない田んぼの環境を行くには安定性に優れたクローラが適しているということになった。
今は普通にそこにあるように思えるロボット。ここに至るまで大変な道のりがあった。
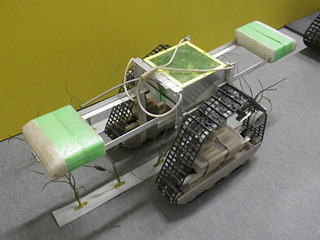
足はクローラと決まった。が、地面を這って行くクローラそのものによって、稲がダメージを受けることにもなろう。そこでまた考えられた、「稲をまたいで」走るのだ!
重心は高くなるが、本体の電子機器が水面から遠ざかり、防水にもなる。
そもそも、除草作業は稲がまだ小さいうちに必要な作業で、成長してしまえば稲そのもので日光がさえぎられ、雑草の成長が抑制できる。またぐといっても、それほど高い位置にしなくていいのだ。
高い重心にバランスをとるため、こんな機体が作られたことも。
この構造では泥や草を巻き込むとやっかいなので、車輪(プーリー)部分をカバーで覆ってみた。
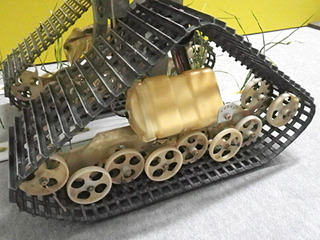
カバーで覆ったこと自体によって余計泥が詰まったりするため、このようにプーリーに隙間を多くしてクリアした。

太陽電池でエネルギーの循環を図ったが、電池自体の重さと電池効率の点で折り合いが難しく・・・。
その上、無人で動いてくれるようセンサで稲の位置を検出し、それに沿って動くようになっている。が、曇りの日や雨の日、そして晴れていても水面からの照り返しが強い場合など、センサの誤作動も出てくる。稲自体も成長する・・・。
それに備えて、稲にどんな光がどのように跳ね返るか計測し、地面との違いを検出し、確実に稲の列を進んでくれるようにせねばならない。

強烈な照り返しの様子(研究所からお借りした画像)。
さらに考えてみよう、水田の環境を。人の足跡で凸凹な水底、土によってまちまちな地面の固さ、必ずしもきれいな直線で植えられているわけではない苗の列・・・
だめだ、考えることが有りすぎる。自分には手に負えない、と勝手にクラクラしてきた。そして細かく不確定なさまざまなハードル。それらを、確実に超えていくことが求められている。

研究所手作りの、模擬稲。実地での検証は田植えの季節、年1回に限られるので大変だ。

お遊びで稲に付けられていたタマムシが、拾ってきた本物と知って驚愕した。

時代は「i」。アイ・ガモ。
「カブマ」との戦い
今までの研究では、十分除草の効果は発揮されているようだ。ロボットを走らせた場合、雑草の量が激減する結果となっている。
ただ、ひとつ、どうしても難しい課題がある。「株間」の問題である。
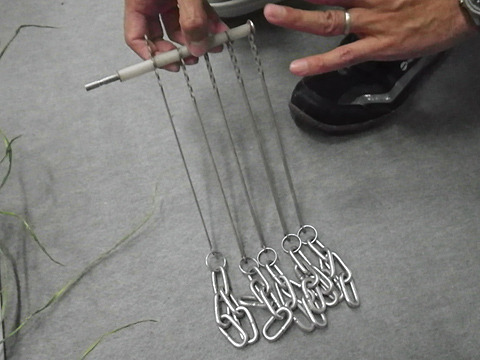
その課題にはこのアタッチメントを使う。
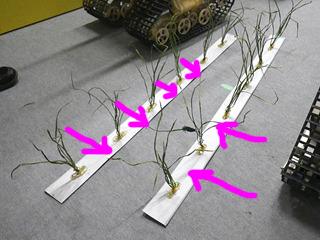
株間とは、この矢印の部分のこと。
稲の列に沿った道ではなく、稲の間の部分。この株間に生えた雑草は、今まで紹介した方法ではカバーしきれないという。ここまで除草を徹底しないと、収穫量の低下は避けられないようだ。
しかし・・・へたに株間に手を出すと、確実に稲自体がやられる。そこで、農家さんも交えての試行錯誤により編み出されたのが、上の鎖帷子というわけだ。

このように、押しつぶすでもなく負荷をかけて、土煙を巻き上げるしくみ。
このようなブラシ状のものも考えたという。一見、これも十分効果があるように見える。なんといっても、ごつい鎖よりも稲にやさしそうだ。
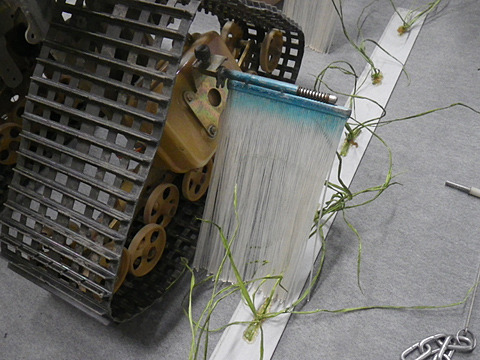
ゆでてない春雨くらいの固さか。
だが彼は、やさしすぎた。稲にはやさしかったが、土煙は十分に起こせなかった。
というように、最適なポイントを見つけるまでの地味な道筋が、私にはどうにも面白いのだ。国の予算でさまざまな団体が関わる研究を進めている方々には、どうにも大変なことだろうけれど。
爆走、アイガモロボット
せっかくここまで来たからには、ぜひともロボットが田んぼを走るところを見たい!実は研究所の玄関前に、テスト用の田んぼらしきものを見たのだ。そこで、これを走らせていただけませんか?
季節外れの実地走行は難しいかと思ったが、快く受けてくださった。

重さ9kgほどの現行機を田んぼまで連れて行く。

これが気になっていたのです。

着水!

地面はそうとう締まっているということで、っこではそれほど土煙は立たないようだ。
は、早い!もっとよたよたとアイガモチックに進むかと思っていたが。こりゃ爆走ではないか。
実は、この田んぼの底は固く締まっていて走りやすいため、かなり速く走れたのだそうだ。実際は人が歩くのより少し遅いくらい(秒速50cm)。約10アール(1反:1000㎡)を1時間で巡回するのだという。この速さで、無人で田園地帯を爆走するアイガモロボットもちょっと見てみたいと思ったが。
1回の充電で3時間の走行が可能だ。これを週2回運用すれば、除草効果が現れるという。
お手入れも、終わったあとに水で洗ってやればOK。わざわざ走らせていただき、ありがとうございました。

なぜかここでちょっとかわいいと思ってしまった。なぜだ?
現在は、農林水産省「新たな農林水産政策を推進する実用技術開発事業」として、この研究が進められている。
今後、さらに改良・実証を行い、平成25年度からの試験販売を計画しているという。もうすぐ実用化というわけだ。本当に、各地の田んぼで、有機栽培を助けるアイガモロボットが働く日も近いのだ。
それにはこの株間の問題、センサを使っての自律走行の安定、また田んぼ自体を元から走行しやすいよう整えるという、農業者側の協力も不可欠という。
作物の価値を高めるために、こういった取り組みが各地で行われている。その一端に触れ、とても頼もしく明るい気持ちになって帰途に着いた。
ご協力いただいた
岐阜県情報技術研究所の皆様、ありがとうございました。
【告知】
NHK青山ワンセグ開発「もーそーまーけっと」という番組が、11/5(土)より3週連続で放送されます。乙幡の工作を通販風にアレンジした番組で、自分もなぜか浴衣で少しだけ出てます。投票によって、今後も制作されるかどうか決まるとのこと。よろしくお願いいたします!
放送日 11/5・11/12・11/19 13:00~13:20
結果発表 11/26(土) 13:00~13:20




